WATonomous Mapping, Environment Modeling, and Decision Making
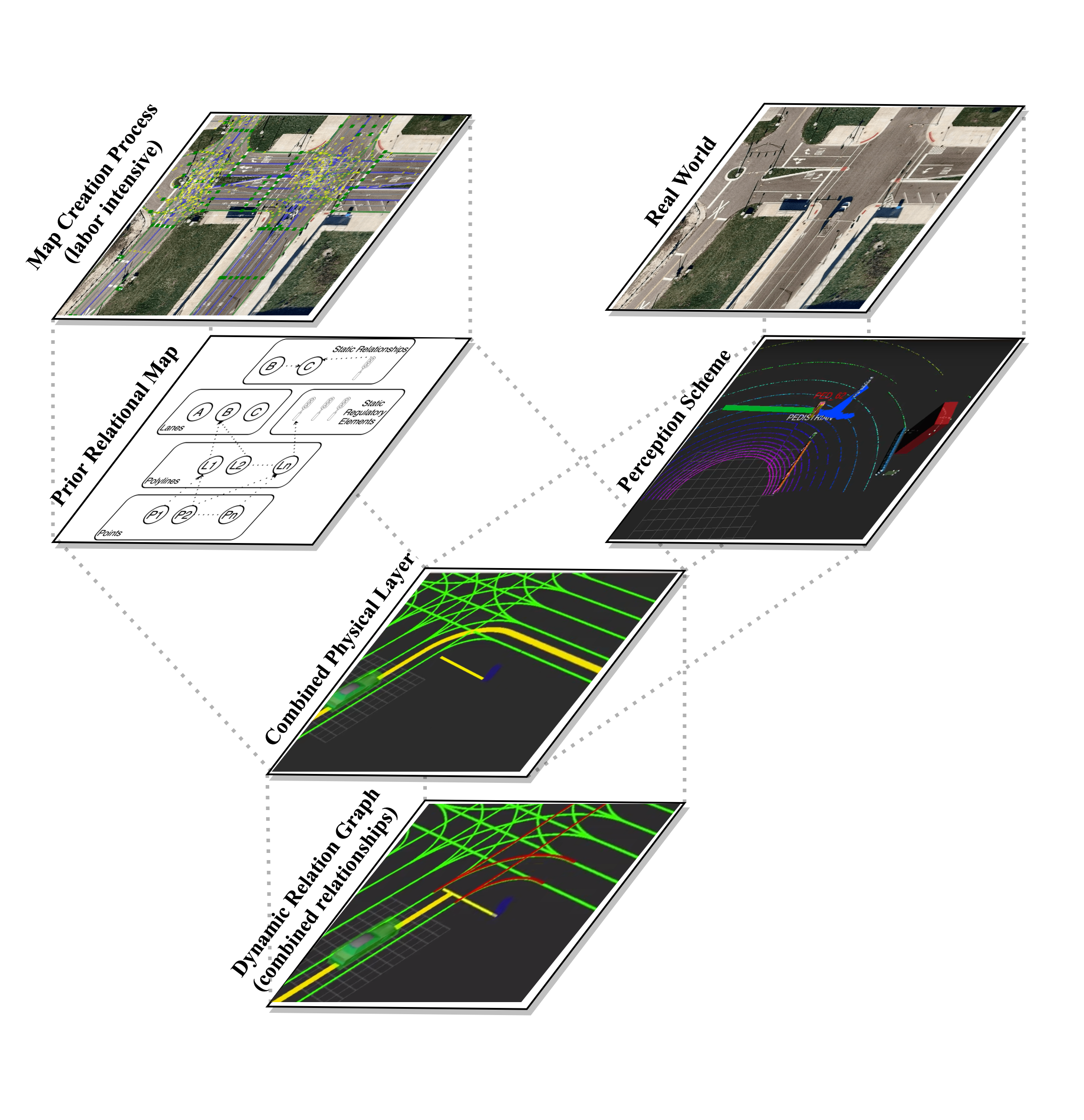
A Dynamic Relation Graph for unified prior-online environment modeling in urban autonomous driving
A Dynamic Relation Graph for unified prior-online environment modeling in urban autonomous driving
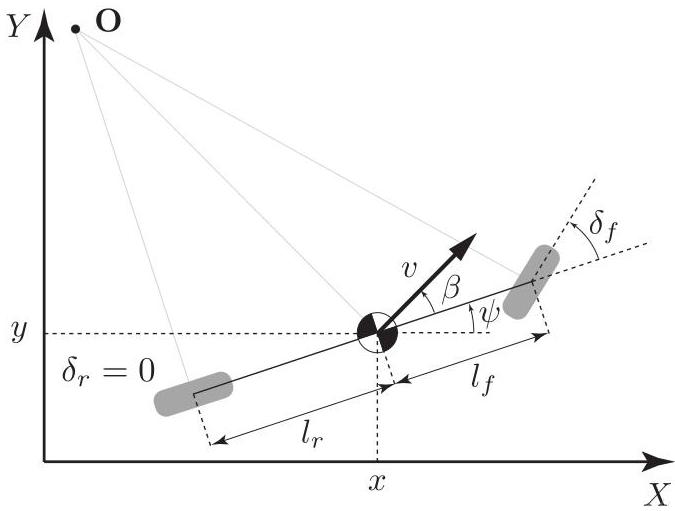
A unified optimal control approach to trajectory planning and control via MPC.
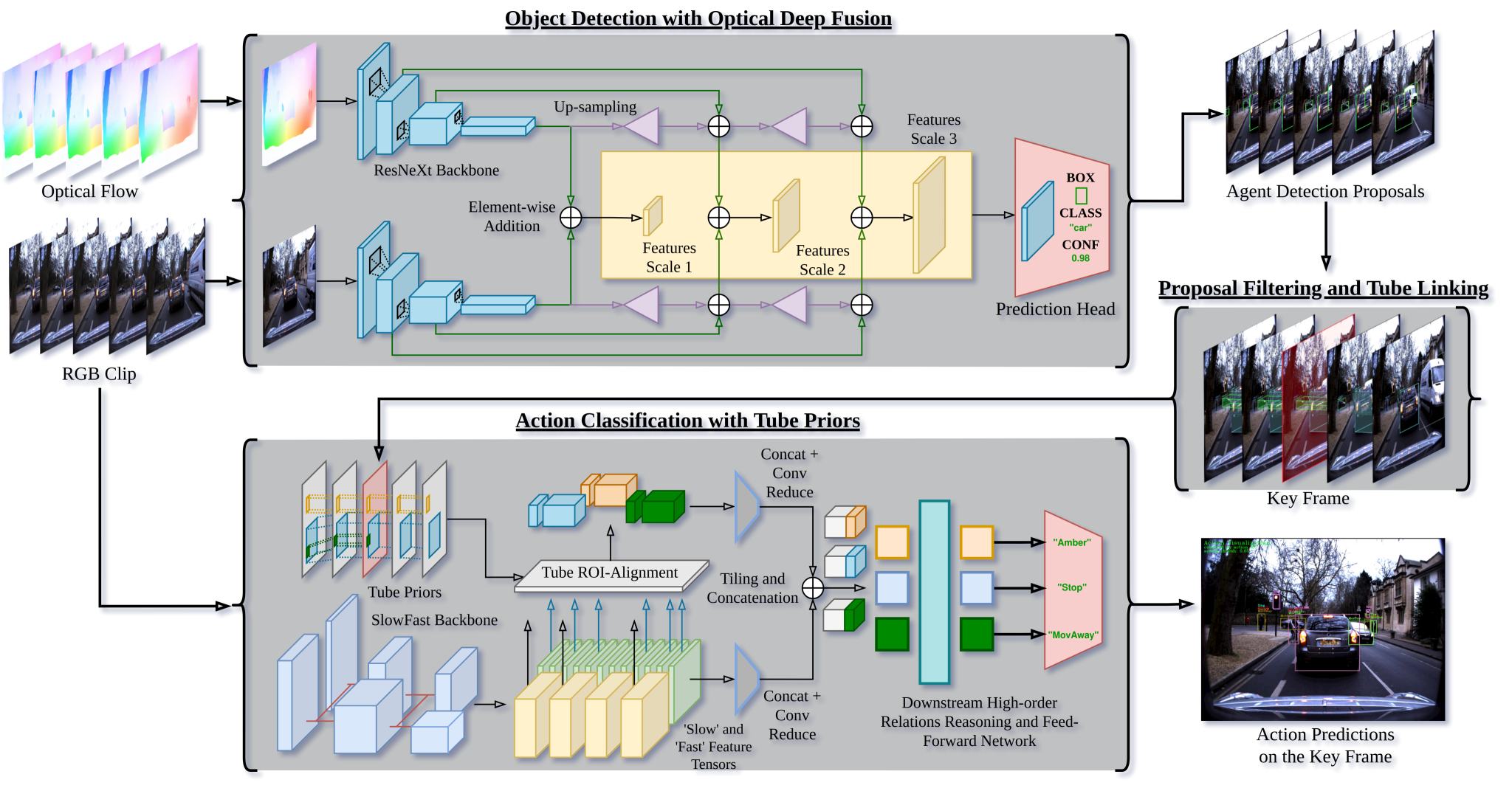
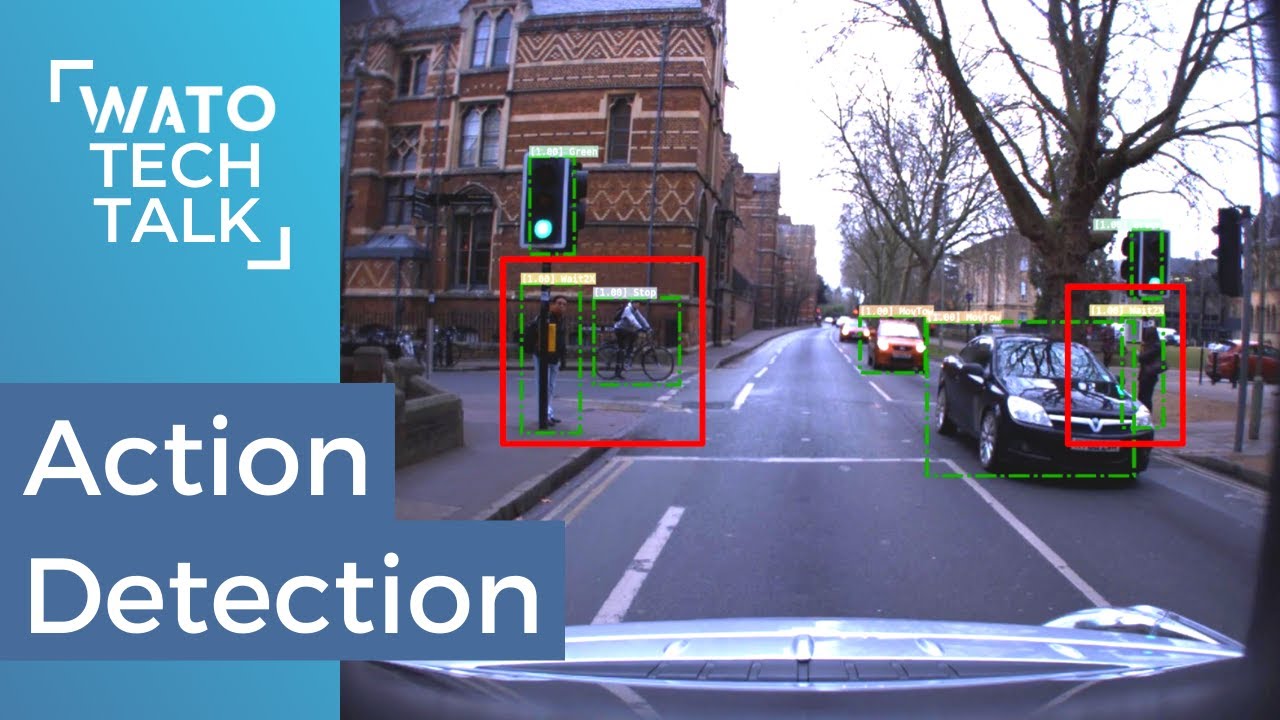
A two-stage approach to the ICCV 2021 ROAD Challenge, featuring optical flow based activity detection and a novel dynamic RoI-Alignment approach.
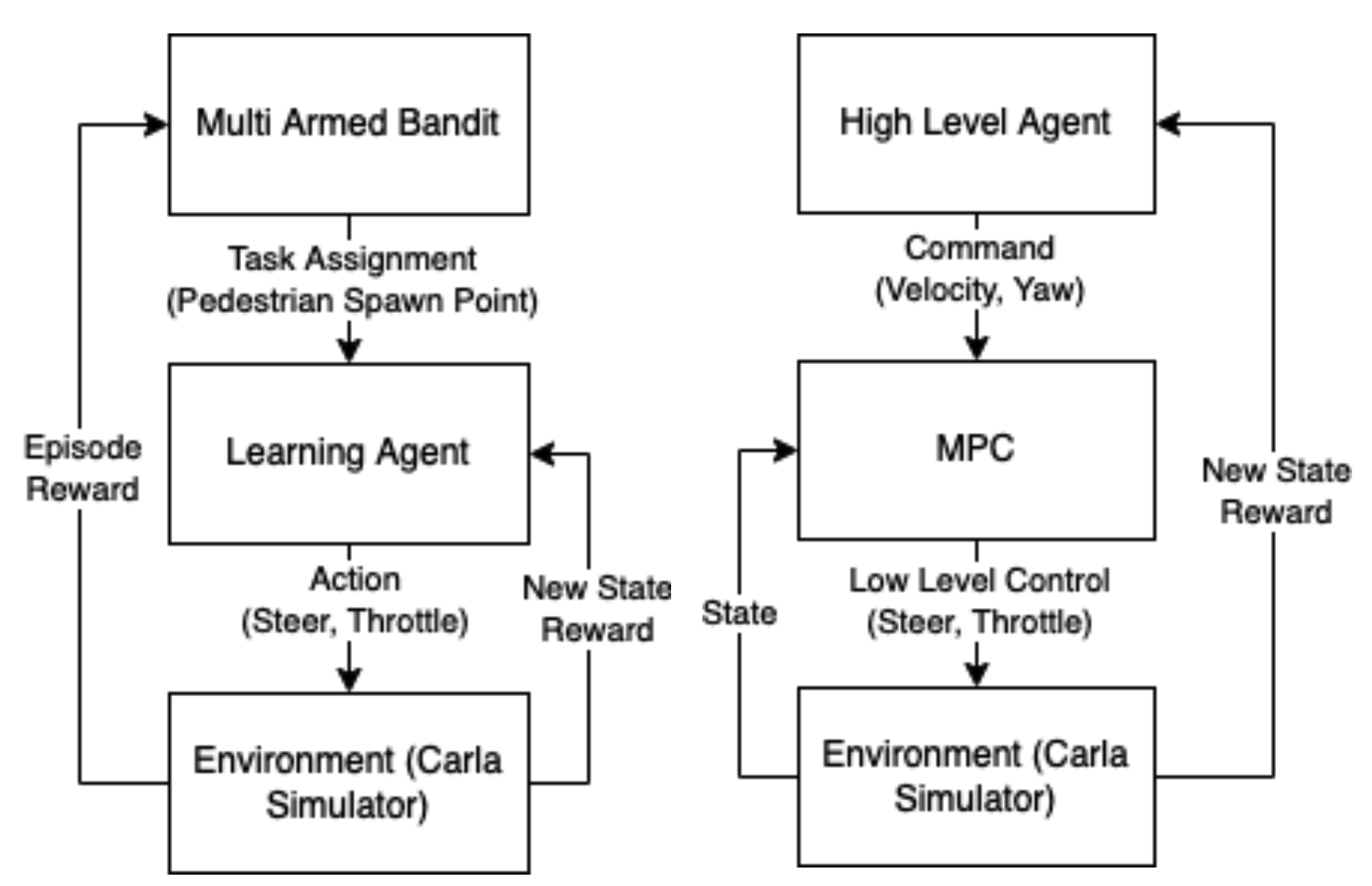
Learning to negotiate unsignalized intersections safely via hierarchical planning and curriculum RL.
Workshop series from Winter 2022 geared towards onboarding new WATonomous members.
WATonomous hosts biweekly AV tech talks at UW, of which I have presented at six.
A two-stage approach to the ICCV 2021 ROAD Challenge, featuring optical flow based activity detection and a novel dynamic RoI-Alignment approach.
Learning to negotiate unsignalized intersections safely via hierarchical planning and curriculum RL.
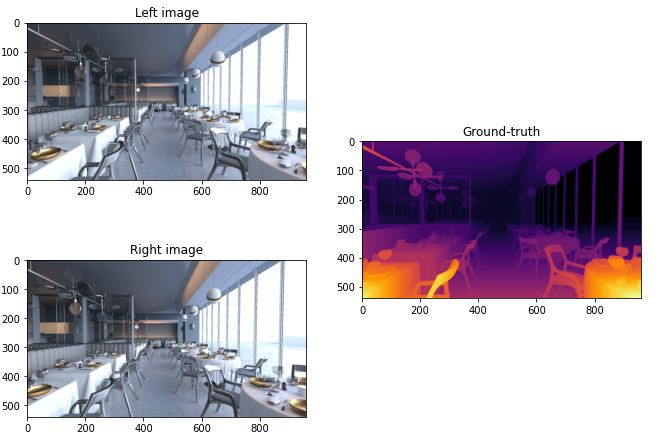
Building a disparity estimation model using self-supervised learning and perceptual loss to combat color-consistency assumption violations.
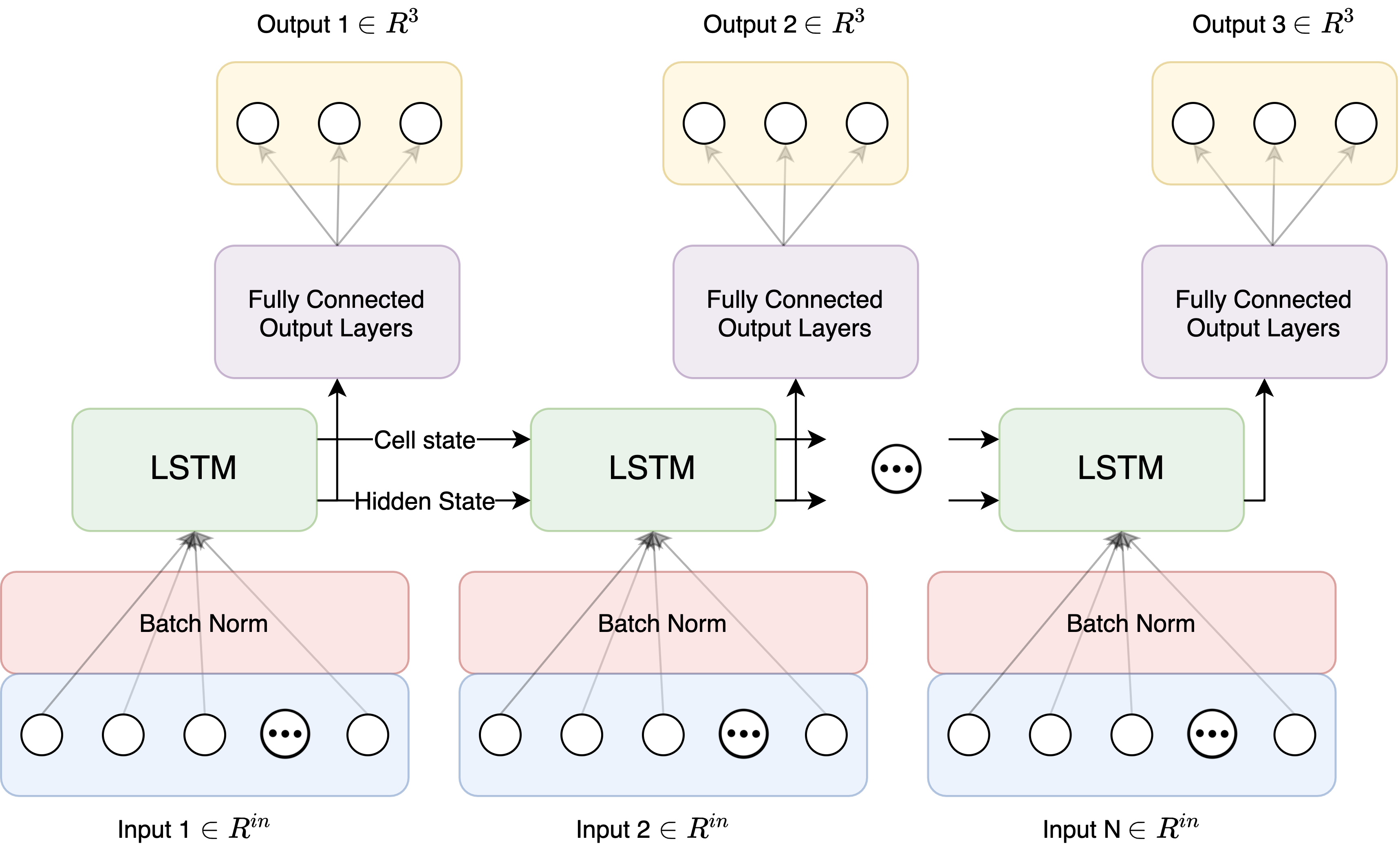
Building a classification model using Deep Neural Networks on the Ontario COVID-19 dataset.
Workshop series from Winter 2022 geared towards onboarding new WATonomous members.
WATonomous hosts biweekly AV tech talks at UW, of which I have presented at six.
A two-stage approach to the ICCV 2021 ROAD Challenge, featuring optical flow based activity detection and a novel dynamic RoI-Alignment approach.
Building a disparity estimation model using self-supervised learning and perceptual loss to combat color-consistency assumption violations.
Learning to negotiate unsignalized intersections safely via hierarchical planning and curriculum RL.
A unified optimal control approach to trajectory planning and control via MPC.
A unified optimal control approach to trajectory planning and control via MPC.
A Dynamic Relation Graph for unified prior-online environment modeling in urban autonomous driving
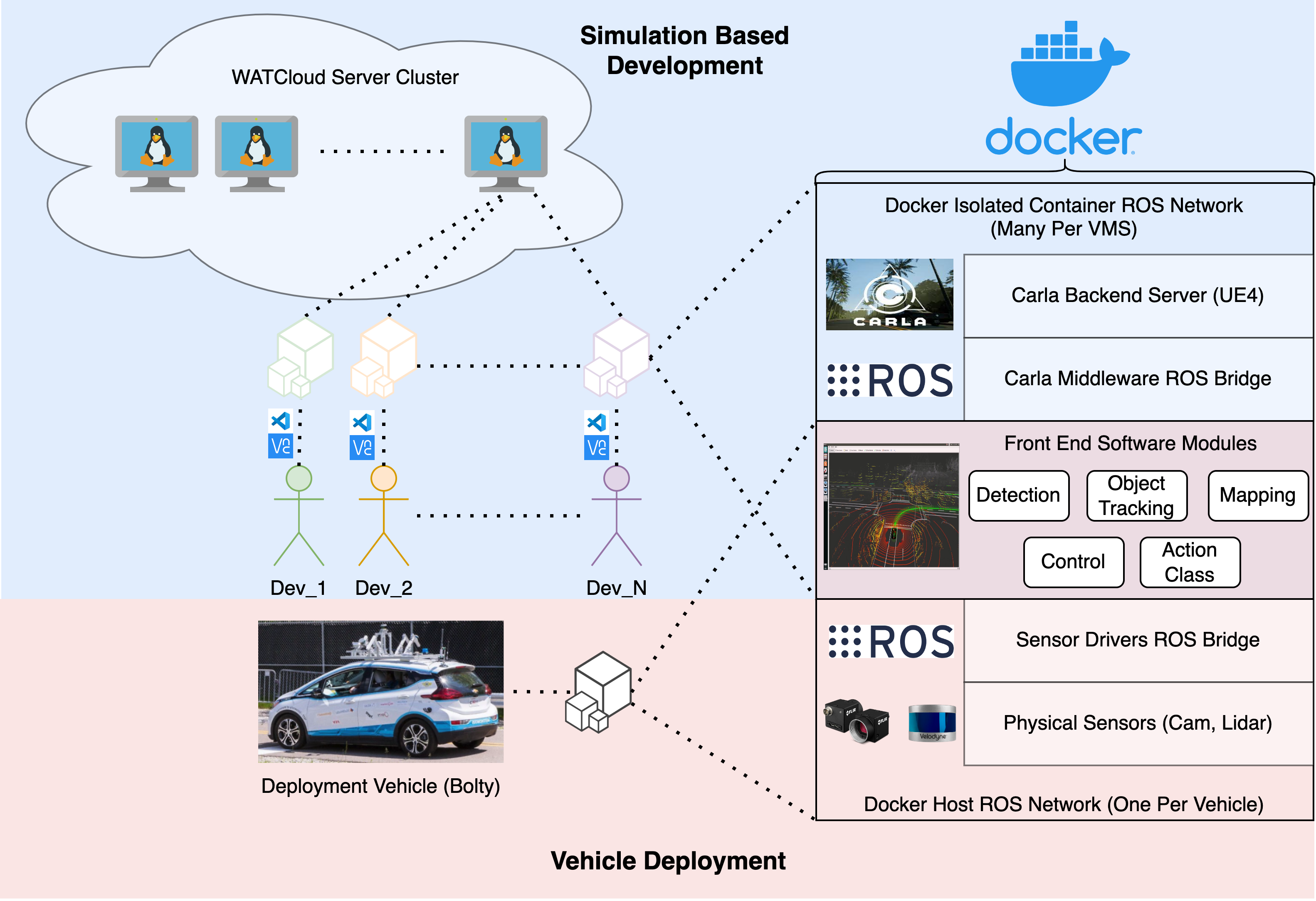
A Dockerized automated driving stack, allowing for fast onboarding, prototyping, and deployment.